Challenge 01
20–30 YOLO Models Before Getting It Right
This was my first time training a YOLO model. We exhausted ourselves iterating on dataset quality, augmentation parameters, and hyperparameters. The custom dataset didn't produce correct results for weeks. We tried different YOLO versions, adjusted anchor boxes, modified learning rates — nothing worked consistently until we refined the training data with stricter annotation standards and proper augmentation diversity.
Lesson: Model accuracy is 80% data quality, 20% architecture. Clean annotations matter more than hyperparameter tuning.
Challenge 02
OCR Character Confusion — 0 vs O, 8 vs B
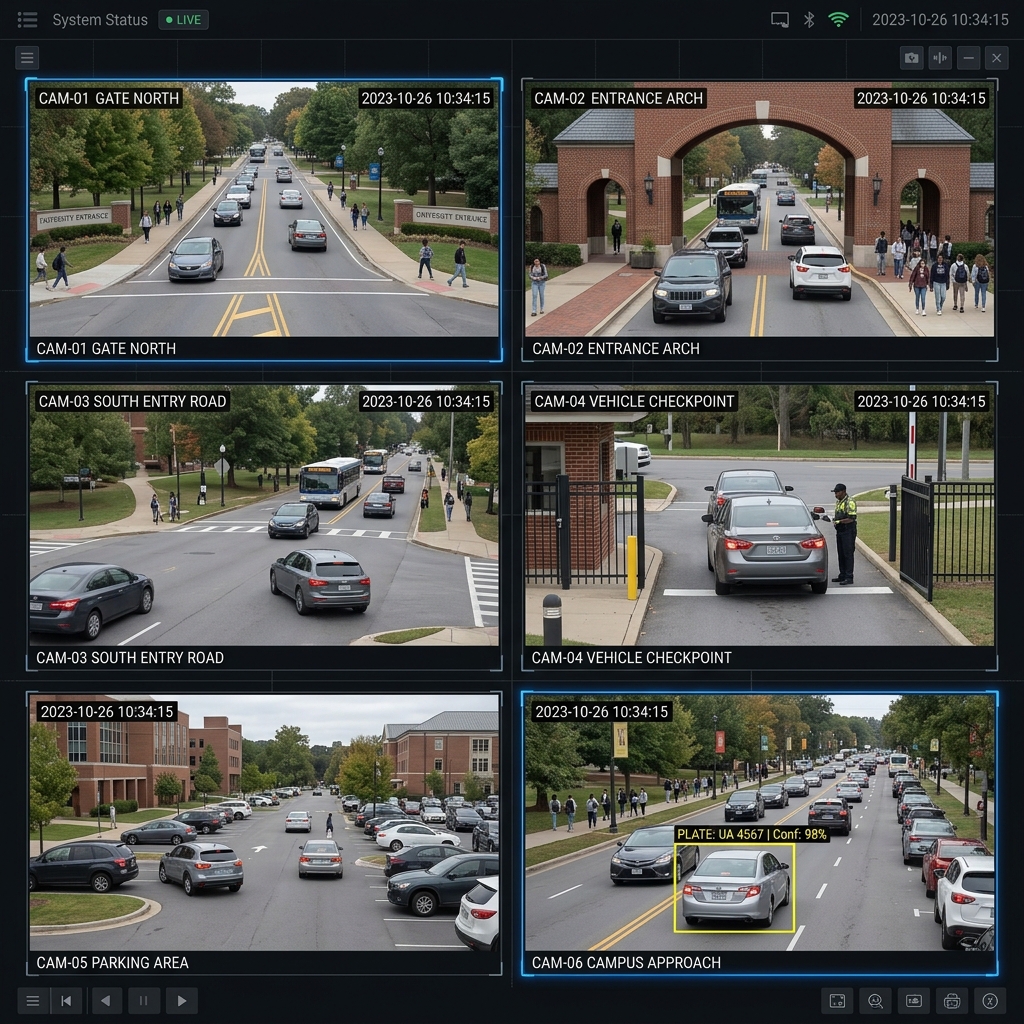
PaddleOCR would consistently misread 0 as O, 8 as B, 1 as l, and 5 as S. This caused valid plates to fail regex validation. We built a character confusion map and an auto-retry system: if the initial regex match fails, the system substitutes commonly confused characters and re-checks. This recovered ~15% of plates that would have been lost.
Lesson: OCR is never 100% accurate — always build a fallback correction layer. Post-processing is as important as the model itself.
Challenge 03
Choosing the Right OCR Engine
We tested Tesseract OCR, TrOCR, and PaddleOCR extensively. Tesseract performed poorly on angled, dirty, or partially occluded plates. TrOCR had better accuracy but was too slow for real-time feeds. PaddleOCR struck the right balance between speed and accuracy, especially on non-standard Indian plate fonts.
Lesson: The "best" tool depends on your constraints. In real-time systems, speed matters as much as accuracy — benchmark before committing.
Challenge 04
Duplicate Entry Edge Cases
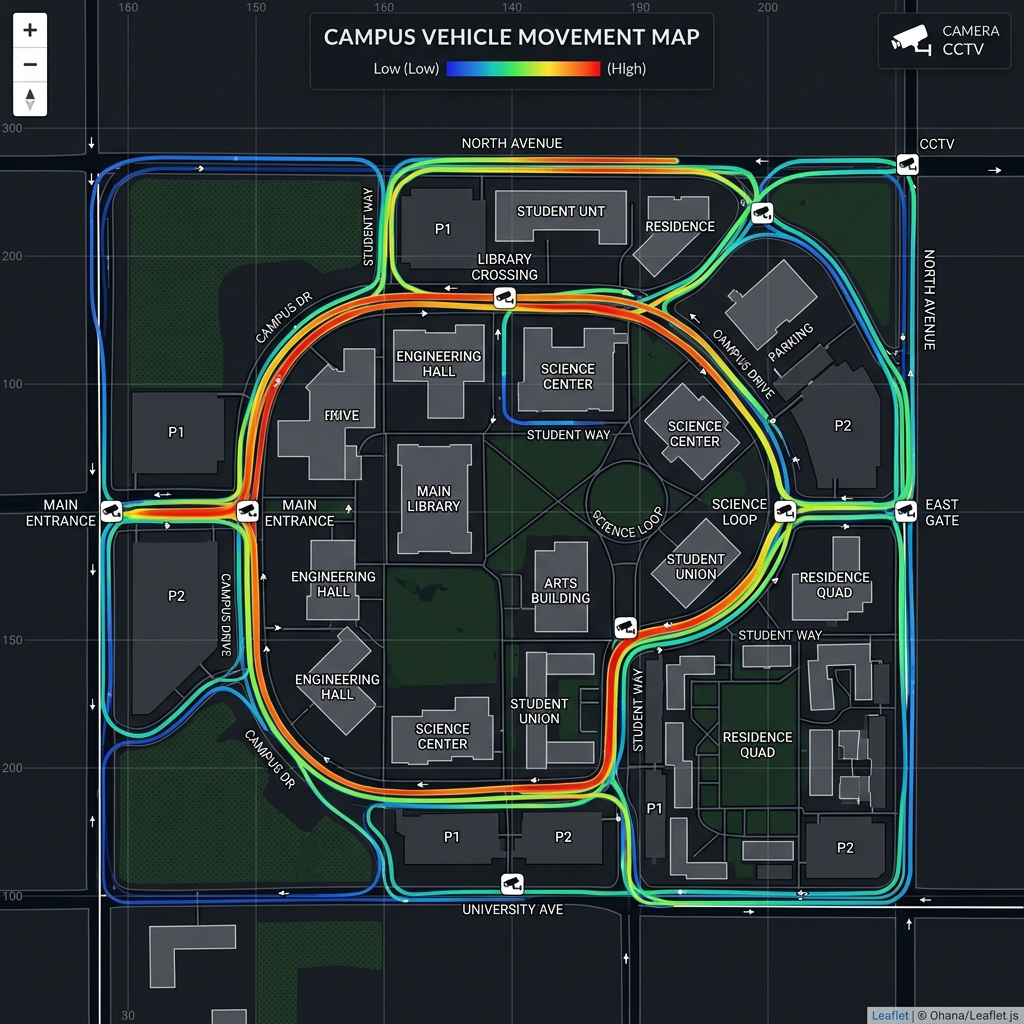
The 5-minute dedup window seemed simple, but edge cases surfaced: vehicles parked near a camera kept triggering re-detections. We had to distinguish between a vehicle "passing through" vs "parked in view." The fix was combining plate ID + camera ID + time window to define uniqueness, preventing stationary vehicles from flooding the log.
Lesson: Simple rules break on real-world edge cases. Always test with actual deployment conditions, not just clean lab data.